Parallel Breakout : assemblage et contrôle des cartes
Bonjour à tous,
Dans la foulée du projet Bionic Puppy (Dell Optiplex GX260n). J'ai préparé des cartes breakouts pour le port parallèle pour faire du prototypage électronique.
Parallel Breakout assemblé
J'ai utilisé des connecteurs 2x20 mâle (sans boîtier) puisque j'en ai à disposition. Cela s’avérera même pratique.
Une nappe GPIO Raspberry-Pi (40 broches) permet de raccorder facilement les deux cartes. Il suffit de garder le fils détrompeur du côté de la broche 1. La sérigraphie sur la carte permet d'aligner les détrompeur très facilement.
Parallel Breakout connecté
Une fois connecté... voila à quoi cela ressemble.

J'ai pris le temps de de tester toutes les connexions pour m'assurer que les raccordement sont impeccable (ce n'est pas comme si je pouvais simplement remplacer la carte mère de BionicPuppy).
 |
| Broches du port parallèle |
Avec correspondance sur le Cobbler
 |
| Brochage/sérigraphie sur le Cobbler |
On y retrouve toutes les broches du port parallèle avec leur identification et libellé d'usage.
J'ai mentionné le mode de fonctionnement par défaut (en effet, cet article indiquait qu'il était possible de modifier le mode des broches Cx en entrée) .
Un câble plus long c'est mieux
Il faut bien avouer d'une nappe GPIO Raspberry-Pi c'est un peu court.
Je suis donc descendu à la cave pour retrouver un vieux câble IDE (aussi appelé PATA) qui utilisent justement un connecteur 2x20 :-)
Cela date des débuts de l'ère informatique, bien avant la connectique SATA de nos jours.
 |
| Câble IDE de 30cm de long |

Alors, ce détrompeur se trouve pile sur une masse (et comme j'ai copié le GPIO d'un Raspberry-Pi... c'est aussi le cas pour un Pi).
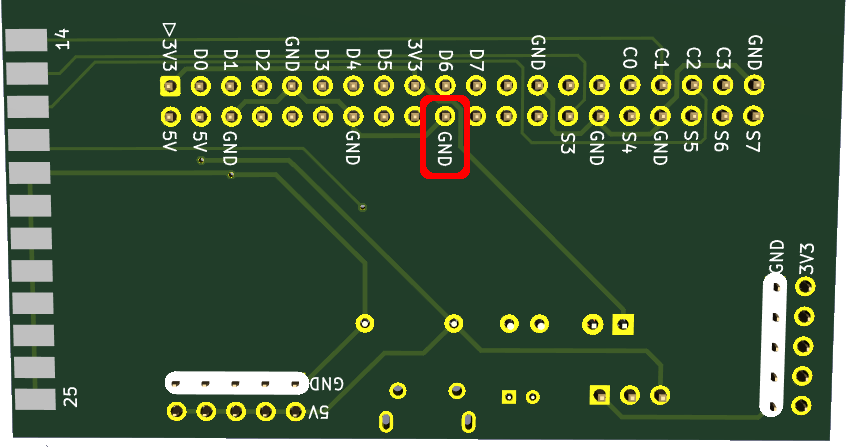
Ce n'est donc pas un problème puisque j'ai raccordé toutes les broches de masses (voila une bonne raison de le faire).
J'ai deux options:
- Couper la broche ma carte (ce que j'ai fais)
- Perforer le détrompeur dans le connecteur
Peut importe la solution... cela fonctionnera. Et comme c'est une signal de masse, cela n'aura aucune incidence sur le fonctionnement (même si ce ruban est utilisé sur un Pi).
Au final, voici à quoi ressemble mon kit de développement pour port parallèle (il me manque encore le connecteur micro-USB).

Je vais enfin pouvoir explorer le développement de solutions sur port parallèle en Python :-)
Dominique





.png)




Écrire un commentaire